| 96 kHz.org |
| Advanced Audio Recording |
|
Physical Modeling with DSPs Physical modeling currently is a big subject in engineering. One the one hand, it might be used for simulating mechanical or electronical behavior to analyze such systems optimize surrounding components to cooperate with such systems. Electronic circuits like e.g. PLCs which are often used to control electromechanical systems, can be tested with the HIL (hardware in the loop) concept, since they run in real time (up to a given speed limit). Various test cases and the behavior of the environment or the user are applied and the response of the system is simulated. Typically, such HIL systems for real time simulation and emulation are created with micro processor units or digital signal processors. For example, a current DSP operating at 80MHz performs a classic 2nd order differential equation which describes a sinus oscillation in about 1us because it needs more than 100 clock cycles for RAM access, wait states, summation, multiplication and storing the three basic parameters position, speed and acceleration. For an appropriate real time operation, around 100 kHz of sample frequency are used to model a 10-20kHz bandwidth system correctly enough to simulate a regulator's behavior which is controlling this system. More than 10 such equations can be solved without exceeding the real time border.
Apart from simulating circuits for analysis, physical modeling can be used to generate output of such systems by intention. Physical models of electrical circuits are used to perform virtual analog modeling of old music synthesizers. Now, this page shows how virtual analog modeling can be used for sound synthesis in modern musical instruments:
A Virtual Analog Synthesizer
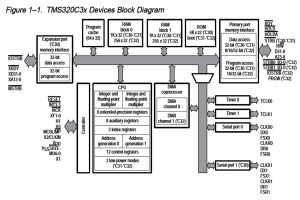
My first approach of a VA-Synthesizer was done in 1998 with a TMS320-System from Texas Instruments formerly used for video applications.
Basic algorithms were introduced to generate some VCOs (which are NCOs in numerical systems of course), some LFOs and some filtering to tweak and manipulate the voices. The first synth on the TMS-platform had 32 voices with 2 Oscillators and 2 LFOs per channel, some global filtering, compressing and limiting. Oscillators were DDS like controlled from the outside. All operated in 16 bit in C language.
A DSP 56302 is used to test some new algorithms:
Virtual Musical Instruments Read more about that in this article Limits of VA-Modeling.
|
| © 2002 Jürgen Schuhmacher |